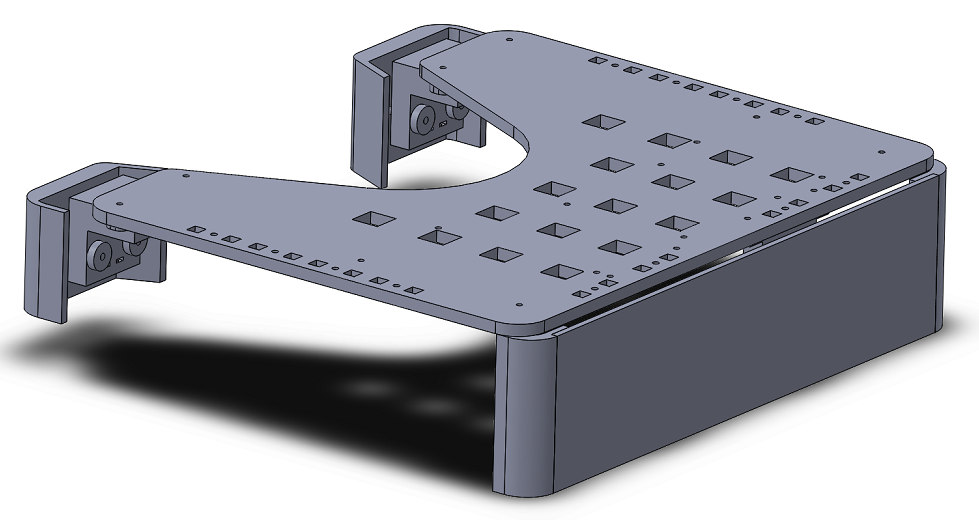
Full AssemblyBotchon consists of four layers of duron. The concept of the design revolves around the ability to encompass the MINER fully so that the MINER is physically guarded. Additionally, the front bumpers, which extend past the MINER in this configuration, can still detect collisions. The discrete layers enable the system to be disassembled modularly, and the increased separation between components reduces the incidence of noise, especially between the motors and the IR signal circuit.
|
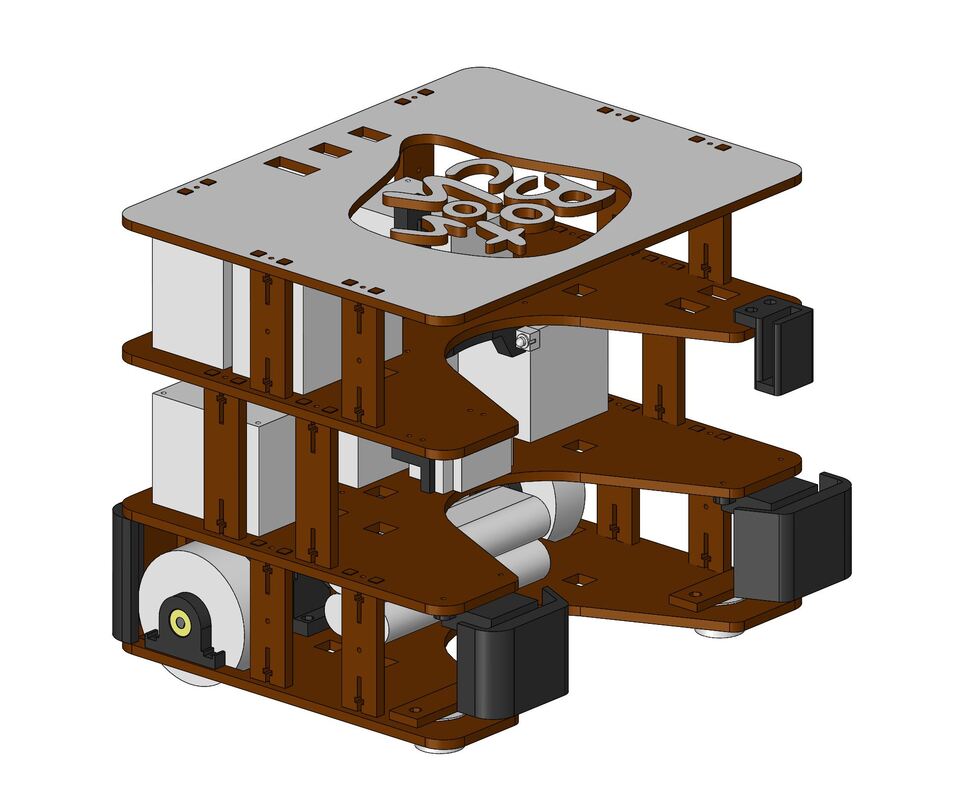
Full assembly with duron sheets in brown, 3D-printed parts in black, and stock parts in white.
|
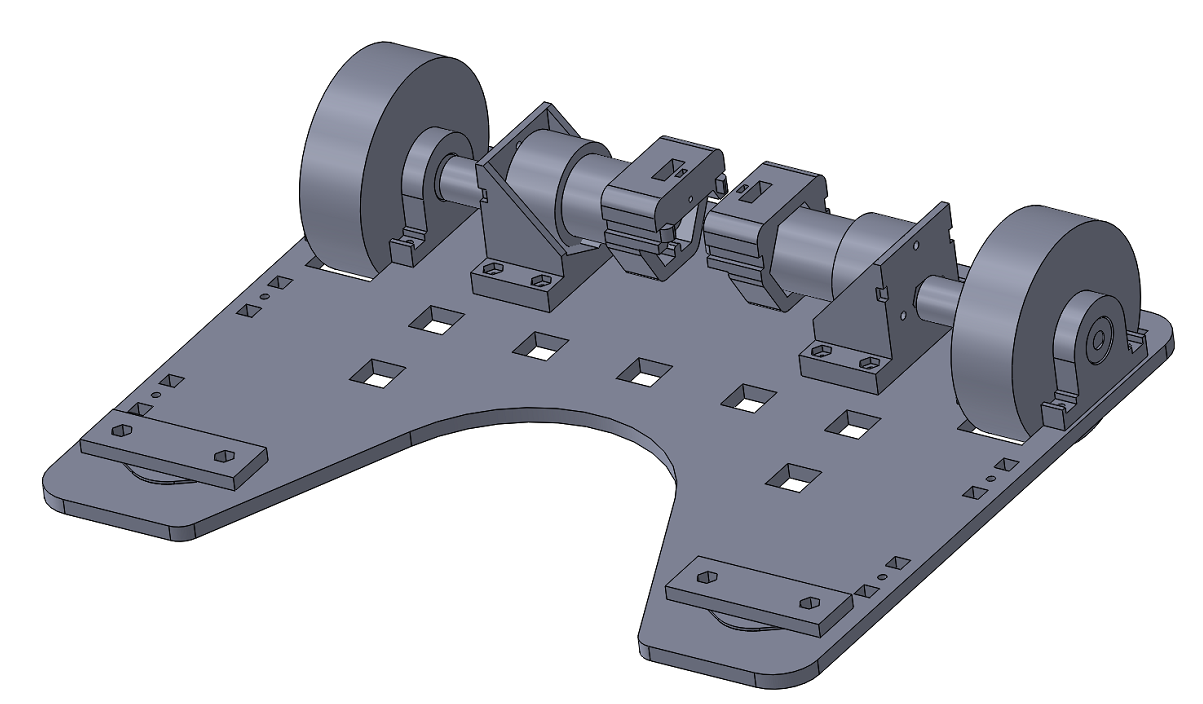
Drive TrainFor the drive train we use two-wheel drive with wheels on the back and two castor wheels on the front. We chose to have four points of contact on the ground because of space constraints related to having the MINER fully encompassed within the volume of the robot. The spider couplers prevent overconstraining from potential misalignment of the motor mounts. Two radial bearings embedded in pillow blocks on each axle keep each wheel assembly axially constrained. The encoder mounts press fit over the back of each motor and keep the encoder at the minimum distance away from the rotating magnet on the motor shaft.
|
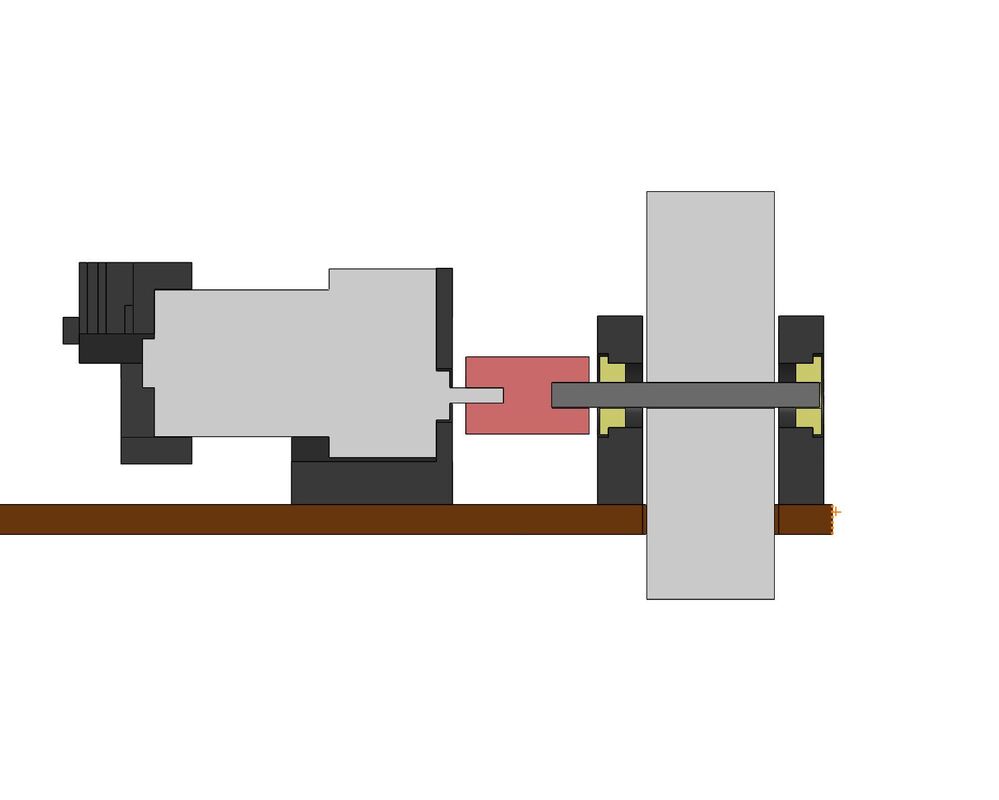
Cross section of drive train assembly. From left to right: encoder mount, motor, motor mount, spider coupler, D-shaft, bearing block, radial bearing, wheel, radial bearing, and bearing block
|
IR ReceiverThe IR receiver consists of a slotted mount and a shroud. The slotted mount allows us to easily adjust the height of the shroud so we can align with the MINER IR transmitters and the shroud is designed to have a narrow width in order to more accurately align with the MINER and a tall height in order to maximize IR radiation received along the y axis.
|

|
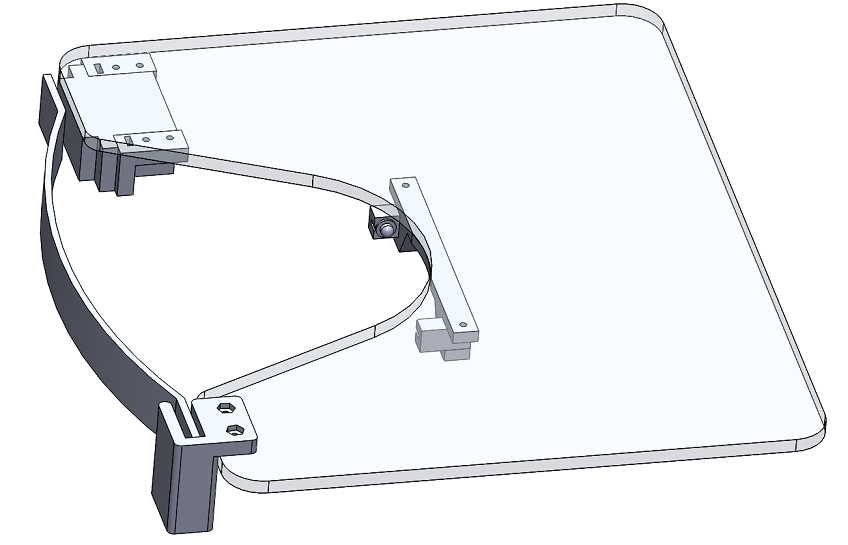
CaptureThe capture subsystem consists of a servo, a servo-arm (seatbelt), a latch, and an IR beam break. When the MINER was detected, the servo opened the seat-belt and when the IR-beam detected a break the seat-belt closed.
The seat-belt was laser cut from acrylic and heat-formed to have a curved shape. This shape was chosen to curve around the MINER and guide the MINER into the robot. |
|
BumpersBotchon has three bumpers. Two in front, and one in back. Each of the front bumpers has a spring-coupled limit switch to enable Botchon to differentiate between bumps on the left or right sides. The back has a bumper that consists of two spring-coupled limit switches. Each assembly consists of the bumper, two pins that press fit into that bumper, two springs, the mount, and a disc that press fits onto the end of the pin to limit motion.
|

Front Bumpers
Back Bumper
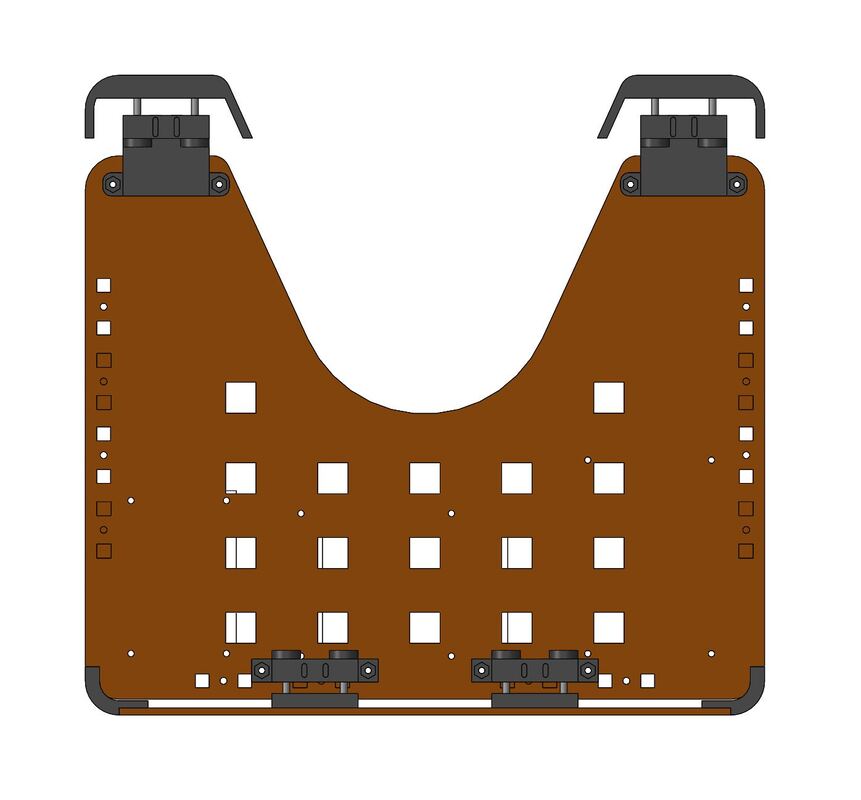
Bottom view of bumpers attached to middle layer
|
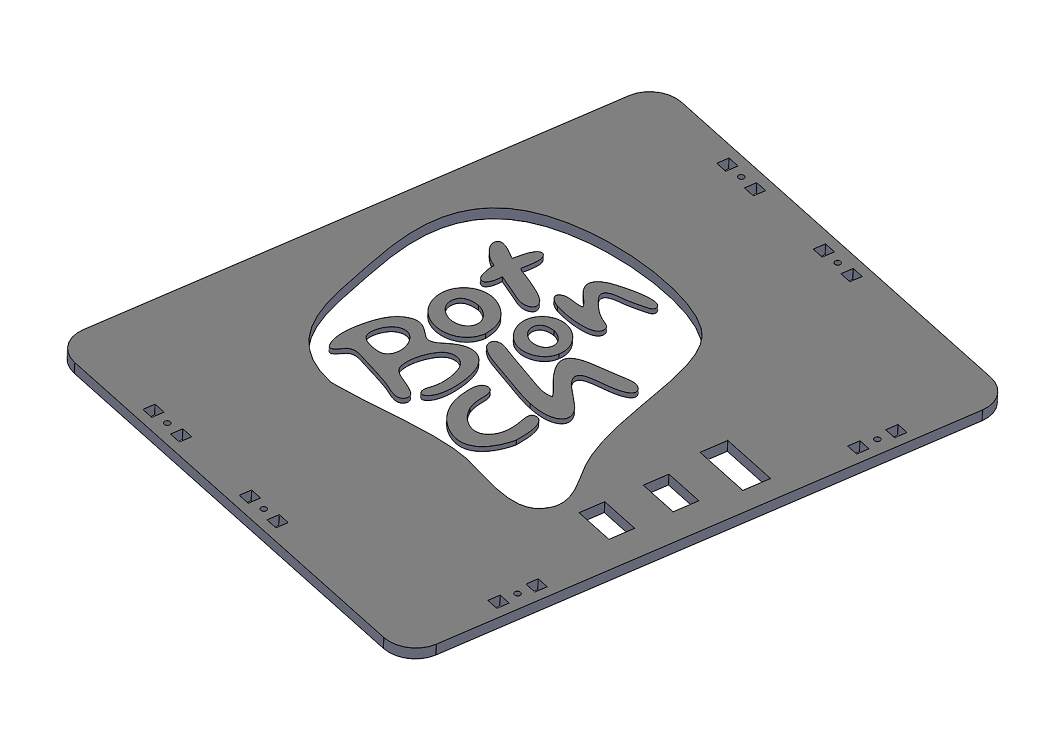
LEDs and decorWe decided to name our robot Botchon because we all enjoy eating Bonchon Chicken. The cover board and letters are laser cut from duron. A transparent layer of acrylic taped to the underside of the cover board keeps the letters up. Underneath the acrylic, a strip of LEDs are inlaid inside a ring of duron and finally a sheet of reflective glossy paper encloses the ensemble to provide maximum reflection.
|
|
Full Assembly Files
| botchon.zip |
For full assembly, go to Structure > all_layers.sldasm
