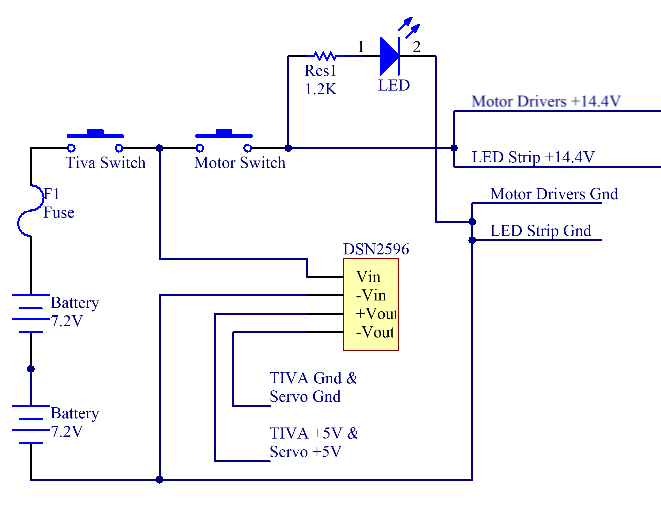
PowerBotchon is powered with two 7.2V NiMH batteries. A 5A fuse protects the system, and two switches control power to the Tiva as well as the motors and LED strip. A buck converter (DSN2596) steps down the 14.4V down to 5V so that the Tiva can be powered.
|
| ||
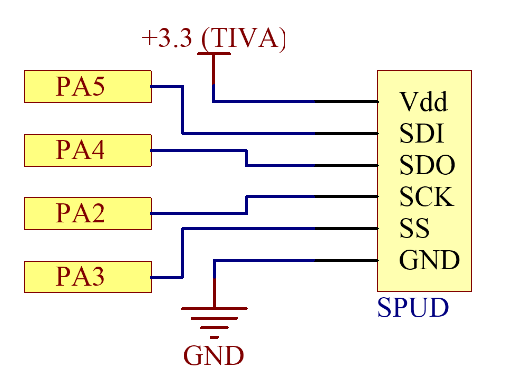
SPUDThe SPUD provides all wireless communications about the gamestate to Botchon. The Tiva communicates with the SPUD via SPI.
|
| ||
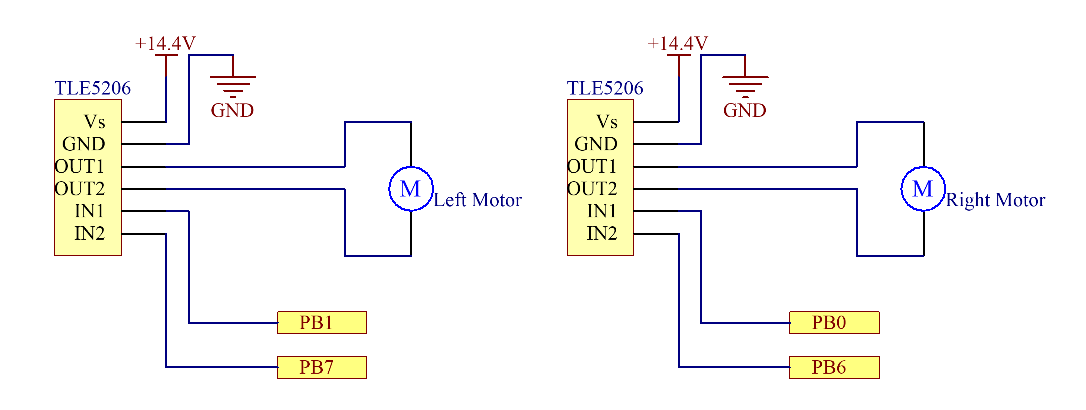
MotorsThe motors are driven with TLE5206 motor drivers. PB0 and PB1 are digital outputs for toggling motor direction while PB6 and PB7 are PWM outputs that control motor speed and direction.
|
| ||
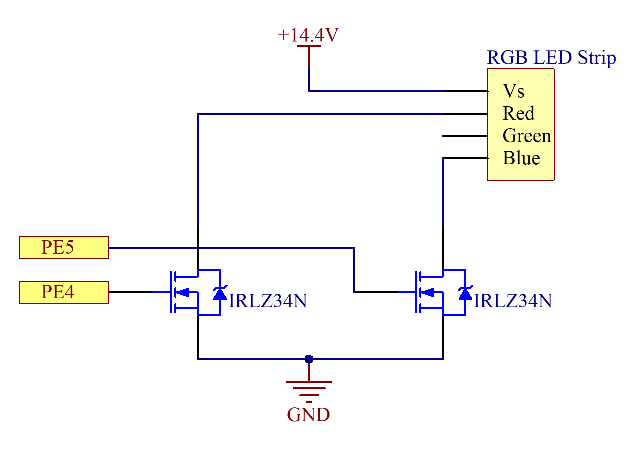
LED StripThe LED strip denotes which company Botchon is mining for. Red indicates CKH while blue indicates GHI. The LED strip is designed to be powered by 12V, but we chose to power it directly from 14.4V because the increased current was acceptable for the hardware.
|
| ||
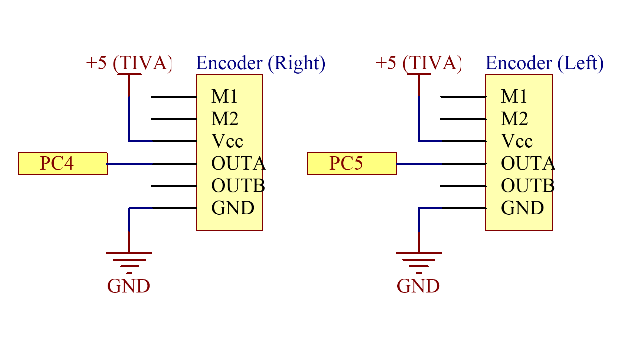
EncodersThe Pololu 4761 encoders were used to measure motor speed. We only used one output since we did not need to detect which direction the motors were rotating.
|
| ||
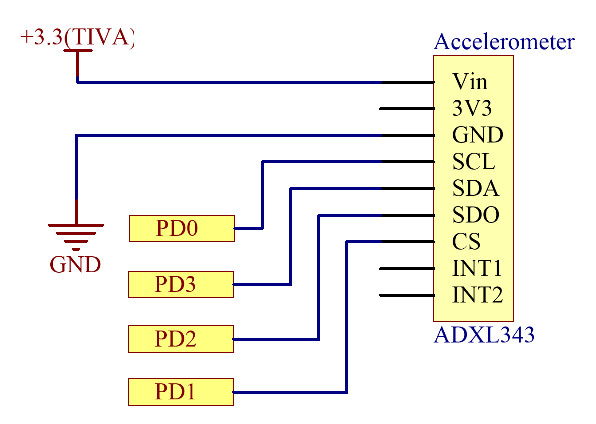
AccelerometerThe ADXL343 accelerometer helps Botchon determine the direction in which it is oriented because the field is tilted at 3 degrees in the Northern direction. The Tiva communicates with the accelerometer via SPI.
|
| ||
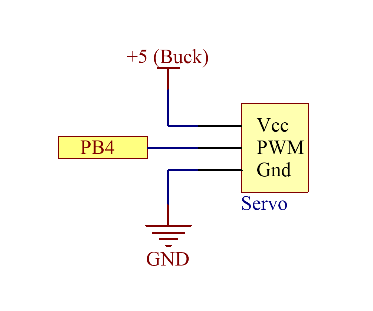
ServoThe servo opens and closes the 'seatbelt' which locks the MINER inside Botchon.
|
| ||
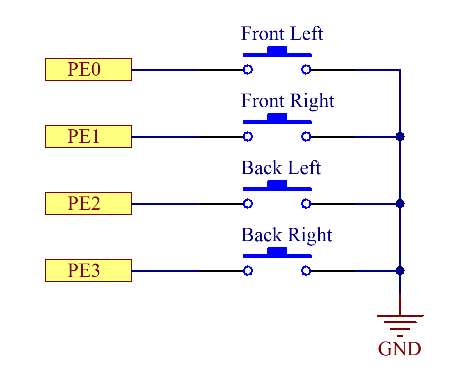
BumpersThe limit switches allow Botchon to detect when it has collided with something in front or behind. The front right and left bumpers are mechanically independent of each other, while the back bumpers are triggered by the same rear bumper which is in contact with two limit switches that provide extra sensitivity to offset collisions.
|
| ||
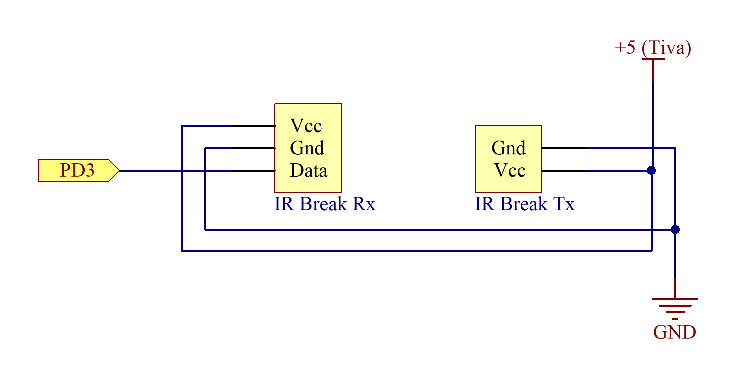
Beam BreakBotchon detects when the MINER has been captured through a QT50CM beam break placed across the opening in front. When the IR receiver senses no IR being emitted, the beam break will trigger through a digital signal.
|
| ||
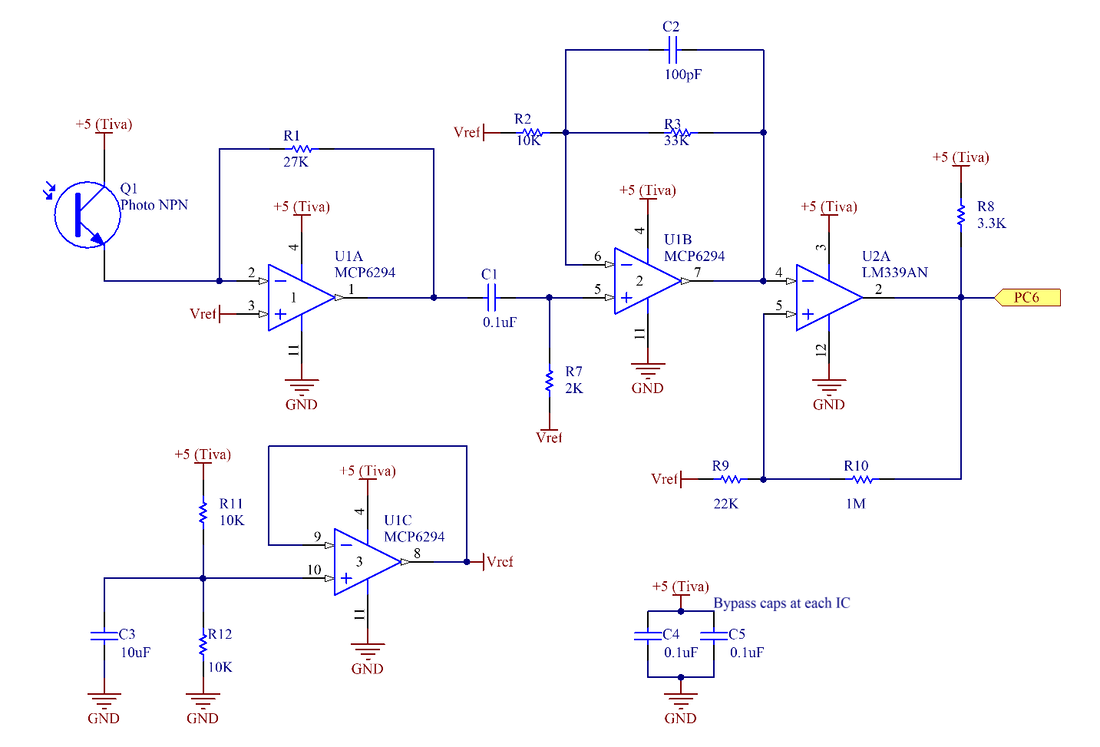
IR ReceiverThe IR receiver detects the signals from the MINERs denoting which one that they are. The first stage consists of a linear phototransresistive circuit. The next stage filters out the DC component of the signal (i.e. the ambient light). The third stage amplifies the signal, and the last stage is a comparator that converts the analog signal into a digital one. There is also a unity gain buffer that provides a reference voltage of 2.5V.
|
| ||
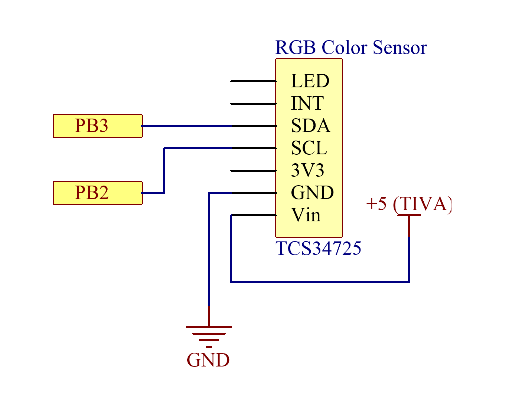
Color SensorThe color sensor enables Botchon to know where it is on the field. The Tiva communicates with the color sensor via I2C.
|
| ||
